
Boston Incubation Center
Established on the foundation of Canon U.S.A.’s corporate philosophy, Kyosei, in November 2012, Canon entered into collaborative research agreements with Massachusetts General Hospital, and Brigham and Women’s Hospital to develop medical robotics technologies.
This collaboration has led to the opening of the Boston Incubation Center (Formerly Healthcare Optics Research Laboratory) in Cambridge, Massachusetts in June 2013.
The research laboratory is approximately 13,600 square feet and is the home of skilled employees dedicated to developing medical robotics technologies with the ultimate goal of bringing medical devices to market for a variety of applications.
The areas that the technology will address include:
- Intelligent Continuum Robot System
Boston Incubation Center, Canon U.S.A. is working in conjunction with its parent company, Canon Inc. and Canon Electronics, a Canon group company.
Intelligent Continuum Robot System
Continuum robots, so-called snake-like robots, have been an area of active interest in clinical and engineering applications. The continuum robots can uniquely adjust and modify their shape at any point along their length. This key feature allows working in confined spaces and complex environments where standard rigid-link robots cannot work. Examples of such instances are minimally invasive medical applications, maintenance for power plants, gas turbines/jet engines, and rescue in hazardous places. The most significant of its implications is with medical applications since catheters and endoscopes already fulfill their role in today's minimally invasive procedures. Canon's strong expertise in innovative motion control and imaging is focused on developing an intelligent continuum robot with superior dexterity in ultra-compact systems.
Reference
- Kobayashi S, Masaki F, King F, Wollin A, Kibel S, Hata N (2023) Feasibility of multi-section continuum robotic ureteroscope in the kidney. Journal of Robotic Surgery, vol. 17, issue 4, pp. 1411-1420, doi: 10.1007/s11701-023-01530-0.
- Kato T, King F, Takagi K, Hata N (2021) Robotized Catheter with Enhanced Distal Targeting for Peripheral Pulmonary Biopsy. IEEE/ASME Transactions on Mechatronics, vol. 26, no. 5, pp. 2451-2461, doi: 10.1109/TMECH.2020.3040314.
- Masaki F, King F, Kato T, Tsukada H, Colson Y, Hata N (2021) Technical Validation of Multi-Section Robotic Bronchoscope With First Person View Control for Transbronchial Biopsies of Peripheral Lung, IEEE Transactions on Biomedical Engineering, vol. 68, no. 12, pp. 3534-3542, doi: 10.1109/TBME.2021.3077356.
- Gao Y, Takagi K, Kato T, Shono N, Hata N (2020) Continuum Robot with Follow-the-Leader Motion for Endoscopic Third Ventriculostomy and Tumor Biopsy. IEEE Transactions on Biomedical Engineering, vol. 67, no. 2, pp. 379-390, doi: 10.1109/TBME.2019.2913752.
- Dupourqu L, Masaki F, Colson Y, Kato T, Hata N, (2019) Trans-Bronchial Biopsy Catheter Enhanced by Multi-Section Continuum Robot with Follow-The-Leader Motion, Int J Comput Assist Radiol Surg., vol. 14, no. 11, pp. 2021-2029. doi: 10.1007/s11548-019-02017-w.
- Kato T, Okumura I, Kose H, Takagi K, Hata N (2016) Tendon-driven continuum robot for neuroendoscopy: validation of extended kinematic mapping for hysteresis operation. Int J Comput Assist Radiol Surg 11 (4):589-602. doi:10.1007/s11548-015-1310-2
Kato T, Okumura I, Song SE, Golby AJ, Hata N (2015) Tendon-Driven Continuum Robot for Endoscopic Surgery: Preclinical Development and Validation of a Tension Propagation Model. IEEE ASME Trans Mechatron 20 (5):2252-2263. doi:10.1109/TMECH.2014.2372635
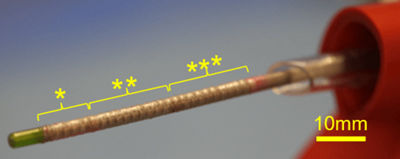
Three Bending Sections
(*Tip, **Middle, ***Proximal)

Tight Bending Curvature
(+: radius 6mm)
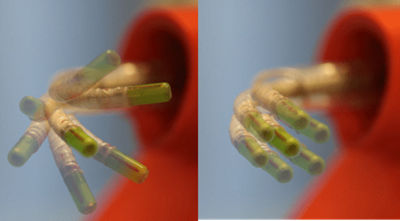
Left - Tip Angulation
Right - Tip Shift
Thanks for signing up!
The application has encountered an unknown error. Please try again in a few minutes!
By clicking Sign Up, you are opting to receive promotional, educational, e-commerce and product registration emails from Canon USA. You can update your preferences or unsubscribe at anytime.